
在工業(yè)控制應(yīng)用上,利用相位差面(Quadrature Interface) 作為反饋信號(hào)十分普遍。一般都是由增雖式光學(xué)編碼器產(chǎn)生,作為直線或角度的位置測(cè)量,編碼器的分辨率和脈沖寬度取決于生產(chǎn)硬件 ,都是原廠設(shè)定,不能更改。一般以毎寸能數(shù)多少次(CPl> 為準(zhǔn)則。 其實(shí)這代表編碼器內(nèi)的刻度,如1000條、2000條等,越高越準(zhǔn)。當(dāng)編碼器的轉(zhuǎn)動(dòng)速度變化時(shí),相位差的脈沖寬度也相應(yīng)變化,速度越饅,脈沖越寬。缺點(diǎn)是在非常低速時(shí)(接近零),脈沖會(huì)變得十分長(zhǎng)。因此數(shù)據(jù)更新時(shí)間也會(huì)被大幅拖長(zhǎng),最終可能產(chǎn)生一個(gè)不穩(wěn)定的速度輸出。
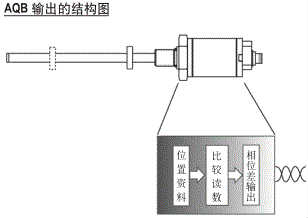
R-系列的AQB輸出磁致伸縮位移傳感器與編碼器不同之處為它是以用戶選定的一個(gè)固定脈沖頻率和分辨率,產(chǎn)生一個(gè)AB相位差的信號(hào)輸出。這樣做的好處是用戶可以按行程、精度和更新時(shí)間作出適當(dāng)?shù)倪x擇。位移傳感器傳感器首先產(chǎn)一個(gè)絕對(duì)值的位置信號(hào),然后轉(zhuǎn)換為一個(gè)“增量式”的倍號(hào)輸出。 每一次當(dāng)位置磁鐵變動(dòng)時(shí),輸出的相位差脈沖數(shù)量會(huì)自動(dòng)增加,加到上一次的記憶里。A和B通道的相位差為9 0 ° ( 即半個(gè)脈沖寬度)。是 A領(lǐng)先B或相反則取決于磁鐵移動(dòng)方向 。因此,系統(tǒng)控制器可以隨時(shí)加上所有脈沖數(shù)量使能獲得最新磁鐵的位置值。AQB輸出的更新速率為1.5ms (以行程少于2540mm算)。而Z通道則代表磁鐵經(jīng)過(guò)零點(diǎn)(通常作為歸零用)。Z通道的脈沖寬更可以放大至15倍,提供提供更長(zhǎng)的零位時(shí)間。
至于“激發(fā)”模 則代表當(dāng)控制器在突然間需要向位移傳感器詢問(wèn)位置時(shí),傳感器可以第一時(shí)間把“絕對(duì)”位置信號(hào)送出至控制器。這個(gè)與正常的數(shù)據(jù)更新不一樣。激發(fā)模式一般 是在斷電后,無(wú)須歸零情況下,馬上重新報(bào)告位置。
R-系列的AQB輸出磁致伸縮位移傳感器可以直接連接控制器毋須外加界面,分辨率高達(dá)毎毫米讀數(shù)500次。用戶除了可選定相位差頻率外,其它的如分辨率,零點(diǎn)位置,領(lǐng)先通道和激發(fā)倍號(hào)延遲等也可以現(xiàn)場(chǎng)編程,十分方便。上述功能為用戶提供了一個(gè)用以取替?zhèn)鹘y(tǒng)光學(xué)編碼器應(yīng)用的良好方案。
AQB輸出的結(jié)構(gòu)圖
AQB界面信號(hào)時(shí)間圖
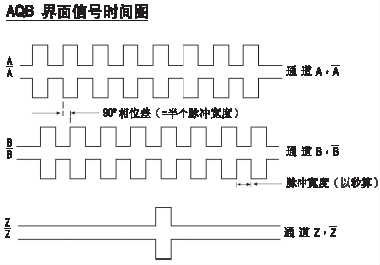
以上信號(hào)例子代表傳感器位移的計(jì)數(shù)次數(shù)。
相位差頻率(Hz)=1/2倍脈沖寬度
AQB的輸出信號(hào)與一般的增量式編碼器輸出信號(hào)無(wú)異,信號(hào)由A/B/Z通道,包括反向通道(主要作為對(duì)外來(lái)噪音的騷擾)的脈沖產(chǎn)生,A通道和B通道經(jīng)常保持著90°的相位差。
Copyright ? 2018 深圳市易測(cè)電氣有限公司 地址:深圳市寶安區(qū)松崗街道紅星社區(qū)宏海大廈5樓 備案號(hào):粵ICP備19052563號(hào) 網(wǎng)站地圖(百度 / 谷歌)
技術(shù)支持:易測(cè)電氣 [易測(cè)電氣]


咨詢熱線")
