傳統(tǒng)的電液伺服控制系統(tǒng)和電液比例控制系統(tǒng)用于對液壓系統(tǒng)的位移、速度、力等物理量進行精確控制,但是不能實現(xiàn)直接的數(shù)字控制,需要通過數(shù)/模-模/數(shù)轉(zhuǎn)換裝置,且電液伺服系統(tǒng)對液壓油的清潔度要求很高,一定程度限制了其應(yīng)用范圍。脈沖液壓油缸,數(shù)字缸等是由步進電機或伺服電機直接驅(qū)動和控制液壓閥,配以內(nèi)部以滾珠絲杠結(jié)構(gòu)組成的機械反饋的液壓缸,可以實現(xiàn)直接數(shù)字信號(脈沖)控制,并且能達到0.0lmm的位置控制精度。但是,由于內(nèi)部機械反饋機構(gòu)存在加工制造困難,安裝精度要求高,容易出現(xiàn)故障且維修麻煩等問題,尤其在油缸行程增大后,上述問題更加明顯,這在一定程度上限制了這類液壓缸的行程。而且在實際應(yīng)用中,還存在換向振動、低速爬行、控制回路的增益難以調(diào)整等問題。
發(fā)明內(nèi)容
針對上述存在的問題,技術(shù)工程師提供一種采用數(shù)字信號帶磁致伸縮位移傳感器內(nèi)反饋數(shù)字伺服液壓缸。
附圖說明
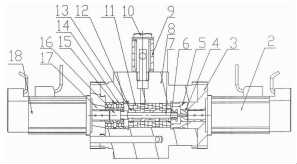
圖1是結(jié)構(gòu)示意圖
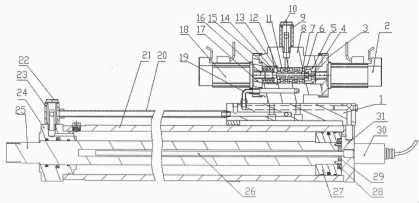
圖2是圖1的側(cè)視圖
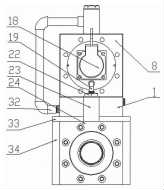
圖3是電機與滑閥組合結(jié)構(gòu)示意圖
具體實施方式
如圖1,圖2,圖3所示
內(nèi)反饋數(shù)字伺服液壓缸由油路集成塊1,油路集成塊豎向支撐板34,油路集成塊橫向支撐板33,第一電機2,第二電機18,滑閥,液壓缸,磁致伸縮位移傳感器30,第一管接頭23,第一空心螺絲22,第二管接頭9,第二空心螺絲10組成。第一電機2和第二電機18可采用伺服電機或步進電機。
液壓缸由缸體21,活塞27,活塞桿25,活塞桿螺母28,缸蓋24,缸底31構(gòu)成,在缸體21的右端設(shè)有缸底31,缸底31通過螺栓與缸體21固定連接,在缸體21的左端設(shè)有缸蓋24,缸蓋24的右端通過螺栓與缸體21固定連接,在缸體21內(nèi)設(shè)有活塞27,活塞27與缸體21之間為密封的滑動配合,在活塞27內(nèi)設(shè)有活塞桿螺母28,位于缸底31 —端,活塞桿螺母28與活塞27內(nèi)螺紋配合,缸體21內(nèi)設(shè)有活塞桿25,活塞桿25的一端插入到活塞桿螺母28中,與活塞桿螺母28螺紋連接,活塞桿25的另一端從缸蓋24的中心孔穿出。液壓缸是把從滑閥中過來的油液產(chǎn)生的液壓能轉(zhuǎn)換機械能,是執(zhí)行元件。
液壓缸的缸底31的外壁設(shè)置有磁致伸縮位移傳感器30,傳感器30與液壓缸的缸底31螺紋連接,活塞桿25的中心處設(shè)有測試孔,磁致伸縮位移傳感器30的測桿26活動的插入在測試孔中,磁致伸縮位移傳感器30的磁環(huán)28固定套裝在活塞桿25上,且位于活塞27的端部。磁致伸縮位移傳感器30的作用是檢測出液壓缸的活塞桿25運動的位移量,反饋給與第二電機18相應(yīng)的驅(qū)動器。
液壓缸的上方設(shè)有油路集成塊1,位于液壓缸的缸底31 —端,油路集成塊的一端通過螺栓與液壓缸的缸底31固定連接,另一端通過螺栓與油路集成塊橫向支撐板33固定連接,在油路集成塊橫向支撐板33的下端對稱設(shè)有油路集成塊豎向支撐板34,油路集成塊豎向支撐板34通過螺栓與油路集成塊橫向支撐板33固定連接。油路集成塊橫向支撐板33和豎向支撐板34的作用是支撐油路集成塊1。
滑閥由閥體8,閥套11,閥桿13,閥芯7,左端蓋17,右端蓋3,聯(lián)軸節(jié)4,軸承14,隔墊15,擋墊12,定位套6,限動套5,反饋螺套16構(gòu)成,滑閥位于油路集成塊I的上方,滑閥的閥體8與油路集成塊I固定連接,在閥體8的兩端對稱設(shè)有端蓋,分別通過螺栓與閥體8固定連接,右端蓋3內(nèi)部設(shè)有聯(lián)軸節(jié)4,在閥體8內(nèi)設(shè)有閥芯7,閥芯7的一端與聯(lián)軸節(jié)4螺紋連接,閥體8內(nèi)設(shè)有反饋螺套16,位于左端蓋17 —端,閥芯7的一端加工有外螺紋,擰入反饋螺套16的右端的內(nèi)螺紋中,反饋螺套16的外表面被兩只軸承14固定,兩只軸承14之間設(shè)有隔墊15,在閥芯7的外表面設(shè)有閥桿13,閥芯7右端階梯軸處設(shè)有定位套6,閥桿13被定位套6固定在閥芯7上,閥桿13通過緊定螺釘與閥芯7固定連接,閥桿13的外表面處設(shè)有閥套11,在閥套11的右端設(shè)有限動套5,閥套11右端被限動套5固定在閥體8的內(nèi)部,閥套11與軸承14中間設(shè)有擋墊12,閥桿13可隨閥芯7在閥套11中軸向移動。滑閥在液壓伺服系統(tǒng)中起信號轉(zhuǎn)換及功率放大的作用,根據(jù)滑閥的閥桿13在閥套11內(nèi)的開口度,可以控制液壓缸的流速及作用力,它對系統(tǒng)的工作性能影響很大。
在滑閥閥體8的兩端對稱設(shè)有第一電機2和第二電機18,第一電機2通過右端蓋3用螺釘與閥體8連接,其電機軸通過聯(lián)軸節(jié)4與閥芯7的一端連接,第二電機18通過左端蓋17用螺釘與閥體8連接,其電機軸插入到反饋螺套16的一端,并通過緊定螺釘與反饋螺套16固定連接。第一電機2控制滑閥的閥芯7運動,第二電機18控制滑閥的反饋螺套16運動。
液壓缸的缸蓋24中設(shè)置有油路孔,缸蓋24上方設(shè)有第一管接頭23,第一空心螺絲22旋裝在第一管接頭23中,其下端插入到缸蓋24的油路孔中,滑閥的閥體8中設(shè)置有油路孔,閥體8上方設(shè)有第二管接頭9,第二空心螺絲10旋裝在第二管接頭9中,其下端插入到閥體8的油路孔中。管接頭和空心螺絲的主要是用于連接油管與閥體8或油管與液壓缸的缸蓋24的中間裝置。
油管C20的一端與第一管接頭23連接,另一端與油路集成塊1連接,油管A19的一端油路集成塊1連接,另一端與滑閥的右端蓋17連接,油管B32 —端與油路集成塊I連接,另一端與第二管接頭9連接。油管的作用傳輸液壓油,并防止液壓油受到污染。
滑閥的閥芯7由第一電機2帶動控制,滑閥的反饋螺套16由第二電機18帶動控制,而磁滯伸縮位移傳感器30將液壓缸位移信號反饋給第二電機18相應(yīng)的驅(qū)動器,通過對反饋螺套16與閥芯7 二者相對運動的控制,實現(xiàn)對液壓缸位移的閉環(huán)數(shù)字控制。
內(nèi)反饋數(shù)字伺服液壓缸的工作原理是:上位控制系統(tǒng)控制第一電機2相應(yīng)的驅(qū)動器,驅(qū)動器控制第一電機2運轉(zhuǎn),第一電機2產(chǎn)生角位移,由于閥芯7通過聯(lián)軸節(jié)4與第一電機2的電機軸相連,故第一電機2帶動閥芯7產(chǎn)生角位移,閥芯7的左端加工有外螺紋,擰入到反饋螺套16的右端的內(nèi)螺紋中,當(dāng)閥芯7旋轉(zhuǎn)時,由于反饋螺套16被兩只軸承14固定,不能軸向移動,又反饋螺套16的左端與第二電機18的電機軸固定連接,此時第二電機18沒有開始工作,故反饋螺套16也不能旋轉(zhuǎn),將迫使閥芯7軸向移動,閥芯7帶動閥桿13產(chǎn)生軸向位移,打開閥的進、回油通道,壓力油經(jīng)閥套11的開口從相應(yīng)的油路集成塊1孔進入到液壓缸中,油壓推動活塞27做直線位移,活塞27帶動活塞桿25直線位移運動,此時,磁致伸縮位移傳感器30檢測到活塞桿25的位移距離,把位移信號反饋給與第二電機18相應(yīng)的驅(qū)動器,驅(qū)動器根據(jù)輸入的位移信號,控制第二電機18工作,第二電機18帶動反饋螺套16旋轉(zhuǎn)運動,旋轉(zhuǎn)方向與閥芯7方向相同,使閥芯7慢慢旋回原位,當(dāng)閥芯7退回到原位時,閥桿13關(guān)閉進、出油口,液壓缸停止運動,整個活塞桿25的運動方向,速度和位移由伺服電機或步進電機控制,實現(xiàn)內(nèi)反饋數(shù)字伺服液壓缸的往復(fù)運動。
由于采用以上技術(shù)方案,內(nèi)反饋部分是磁致伸縮位移傳感器的磁環(huán)固定套裝在活塞桿上,磁滯伸縮位移傳感器測量出液壓缸的位移,第二電機根據(jù)磁致伸縮位移傳感器檢測的位移反饋信號來控制反饋螺套的運動,第一電機控制閥芯運動,通過對反饋螺套與閥芯二者相對運動的控制,實現(xiàn)對液壓缸位移的閉環(huán)數(shù)字控制。采用這種內(nèi)反饋的數(shù)字伺服液壓缸,與電液伺服系統(tǒng)相比,增益易調(diào)整,無需數(shù)/模轉(zhuǎn)換,可直接閉環(huán)數(shù)字控制。與采用機械反饋結(jié)構(gòu)的數(shù)字缸相比,結(jié)構(gòu)簡單,控制精度高,振動小,穩(wěn)定性好,并且更適合于液壓缸長行程、大推力的工作場合
Copyright ? 2018 深圳市易測電氣有限公司 地址:深圳市寶安區(qū)松崗街道紅星社區(qū)宏海大廈5樓 備案號:粵ICP備19052563號 網(wǎng)站地圖(百度 / 谷歌)