在本實(shí)用新型作出以前,若需對液壓缸內(nèi)的活塞桿運(yùn)行位置或速度進(jìn)行監(jiān)測,并實(shí)現(xiàn)自動控制,其方法是在液壓缸帶動的運(yùn)行機(jī)構(gòu)上安裝外置式線性位移傳感器。由于線性位移傳感器設(shè)置于液壓缸之外,不僅占據(jù)空間多,而且易受周圍工作環(huán)境的影響,例如油漬、溶液、塵埃的污染。嚴(yán)重時,無法對活塞桿的運(yùn)行進(jìn)行精確測量,難以實(shí)現(xiàn)自動控制。
發(fā)明內(nèi)容
本實(shí)用新型的目的在于提供一種帶有磁致伸縮位移傳感器的高壓重型液壓缸。該液壓缸,占居空間少、不受周圍工作環(huán)境影響、能實(shí)現(xiàn)對其活塞桿運(yùn)行位置的精確測量,能實(shí)現(xiàn)自動控制。
為實(shí)現(xiàn)上述目的,本實(shí)用新型采用以下技術(shù)解決方案:本實(shí)用新型的帶有線性位移傳感器的高壓重型液壓缸,包括缸筒。缸筒內(nèi)有活塞桿,其前后端分別固定有缸頭和缸底,該缸頭和缸底上有中心孔。活塞桿的前端穿過缸頭的中心孔后與連接頭相接,其與缸頭的通孔間呈密封狀滑動配合。其特點(diǎn)是活塞桿的后端有周向凸臺,該周向凸臺與缸筒間亦呈密封狀滑動配合。活塞桿后端固定有緩沖磁鐵盒,該緩沖磁鐵盒內(nèi)固定有磁環(huán)。活塞桿、緩沖磁鐵盒和缸底上均有中心孔。缸底的外端固定有傳感器,該傳感器與缸底間相密封,其波導(dǎo)桿依次穿過缸底的中心孔、磁環(huán)和緩沖磁鐵盒的中心孔后,插入活塞桿的中心孔內(nèi)。
由于本實(shí)用新型的帶有線性位移傳感器的高壓重型液壓缸,其活塞桿的后端有周向凸臺,該周向凸臺與缸筒間亦呈密封狀滑動配合。活塞桿后端固定有緩沖磁鐵盒,該緩沖磁鐵盒內(nèi)固定有磁環(huán)。活塞桿、緩沖磁鐵盒和缸底上均有同心孔。缸底的外端固定有傳感器,該傳感器與缸底間相密封,其波導(dǎo)桿依次穿過缸底的同心孔、磁環(huán)和緩沖磁鐵盒的同心孔后,插入活塞桿的同心孔內(nèi)。使得傳感器機(jī)器波導(dǎo)桿與液壓缸融為一體,不進(jìn)、僅占居空間少,而且不手受周圍工作環(huán)境影響,能對活塞桿的運(yùn)行位置進(jìn)行精確測量,能實(shí)現(xiàn)自動控制。
附圖說明
圖1是本實(shí)用新型的帶有磁致伸縮位移傳感器的高壓重型液壓缸剖視示意圖;
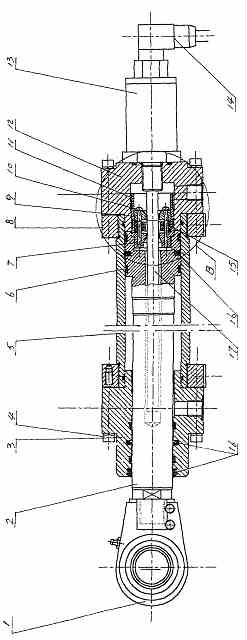
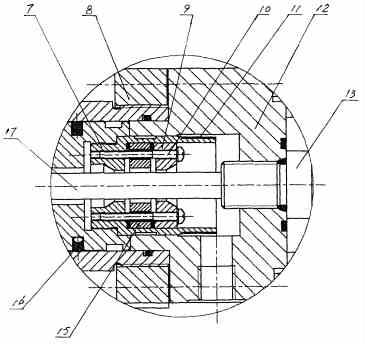
圖2是圖1的B放大圖。
具體實(shí)施方式
見圖1和圖2,本實(shí)用新型的帶有線性位移傳感器的高壓重型液壓缸,包括缸筒5,缸筒5內(nèi)有活塞桿2。缸筒5的前后端分別安裝有缸頭3和缸底12。其中:缸頭3和缸底12為圓柱形,其外圓的中間沿其周向加工有凸臺,缸筒(5)的前后端均加工有外螺紋,套圈8的內(nèi)圓上亦對應(yīng)地加工有螺紋,缸筒5的前后端均旋擰一套圈8,以便在缸筒5的前后端均形成法蘭。缸筒5的前后端分別套在缸頭3的后端和缸底12的前端上,并借助于螺釘4和墊圈使缸筒5前后端法蘭與缸頭3、缸底12外圓上的凸臺相固連。與此同時,要使套圈8的外圓直徑與缸頭3和缸底12外圓上的周向凸臺直徑相等。缸頭3和缸底12上均有中心孔,活塞桿2的前端伸出缸頭3的中心孔之外,其端部采用螺紋接有一連接頭1,以用于與運(yùn)行機(jī)構(gòu)相連接。活塞桿2的后端處于缸筒5內(nèi),其端部直徑較大且與缸筒5的內(nèi)徑相等,以形成周向凸臺。該周向凸臺與缸筒5間通過導(dǎo)向環(huán)6和密封圈16呈滑動配合。活塞桿2的后端設(shè)置有緩沖磁鐵盒7,緩沖磁鐵盒7內(nèi)有一磁環(huán)15,磁環(huán)15外面有壓蓋9。該壓蓋、磁環(huán)、緩沖磁鐵盒均借助于螺釘10固定在活塞桿2后端上。所說的緩沖磁鐵盒7為圓筒狀,其后端外圓上套有感應(yīng)套11。
缸底12的外端安裝有磁致伸縮位移傳感器13,該線性傳感器與缸底12間通過密封圈相封接,其前端的波導(dǎo)桿17依次穿過缸底12的螺孔、壓蓋9的中心孔、磁環(huán)15和緩沖磁鐵盒7底部的中心孔后,插入活塞桿2的中心孔內(nèi)。
所說的磁致伸縮位移傳感器13為德國Germanjet公司生產(chǎn)的19H系列。其在工作狀態(tài)下與控制中心14相接。
本實(shí)用新型的帶有磁致伸縮位移傳感器的高壓重型液壓缸工作時,其內(nèi)的活塞桿2在液體壓力的作用下沿缸筒5作往復(fù)直線運(yùn)動,從而帶動其后端的緩沖磁鐵盒7及其磁環(huán)15沿波導(dǎo)桿17作往復(fù)運(yùn)動。使磁致伸縮位移傳感器13利用兩個不同磁場相交而產(chǎn)生一個應(yīng)變脈沖信號,由控制中心14檢測所需的時間周期,從而換算出活塞桿2運(yùn)動的準(zhǔn)確位置。其中的兩個磁場,一個來自磁環(huán)15,另一個則源波導(dǎo)桿17的電流脈沖。
Copyright ? 2018 深圳市易測電氣有限公司 地址:深圳市寶安區(qū)松崗街道紅星社區(qū)宏海大廈5樓 備案號:粵ICP備19052563號 網(wǎng)站地圖(百度 / 谷歌)