

很多運(yùn)動(dòng)控制需要速度或者加速度的計(jì)算及控制,因此位置數(shù)據(jù)的延遲需要盡可能地小,而且延遲時(shí)間的變動(dòng)也要盡量小。
同步模式1下,傳感器會(huì)自適應(yīng)控制器的詢問(wèn)周期來(lái)設(shè)定測(cè)量周期。
當(dāng)磁致伸縮位移傳感器感知到控制器的詢問(wèn)周期后,位移傳感器就知道控制器會(huì)在何時(shí)來(lái)讀取位置數(shù)據(jù),傳感器自動(dòng)設(shè)定位置測(cè)量的時(shí)間,使每次控制器來(lái)讀取位置前完成位置測(cè)量,從而提供最新的位置數(shù)據(jù)給控制器。
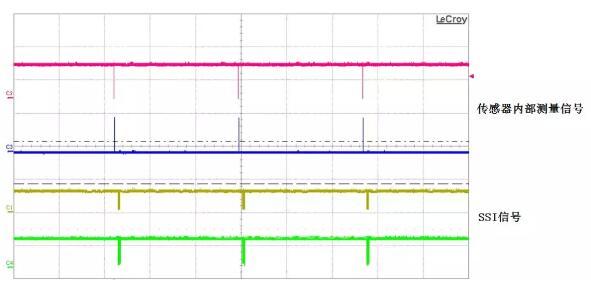
同步模式1下,位移傳感器適應(yīng)控制器的采集數(shù)據(jù)周期,延遲誤差較小,延遲與傳感器全行程的測(cè)量周期相同。
Copyright ? 2018 深圳市易測(cè)電氣有限公司 地址:深圳市寶安區(qū)松崗街道紅星社區(qū)宏海大廈5樓 備案號(hào):粵ICP備19052563號(hào) 網(wǎng)站地圖(百度 / 谷歌)
技術(shù)支持:易測(cè)電氣 [易測(cè)電氣]


咨詢熱線")
