啟動
1. 校驗連接
磁致伸縮位移傳感器是采用極向反接保護,但是部件可能會受到不適當?shù)慕泳€連接和過電壓的損害。在施加電源前,要校驗
連接是正否確。
2.接通電源
注意,當位移傳感器是閉環(huán)系統(tǒng)的一部分,而其參數(shù)還未組態(tài)時,初次接通電源,系統(tǒng)可能執(zhí)行尚未受控的運動。
位置更新
磁環(huán)在桿上的位置是由脈沖行程時間方法精確確定的。位移傳感器將這種位置值轉換為二進制的24、25或26位二進制或格雷瑪數(shù)據(jù)串,然后通過SSI發(fā)送到主控制器。所有的位移輸出是絕對值,位置數(shù)據(jù)在電源中斷后立即可獲得。
在異步模式中,位置信息更新頻率可達每秒4000次測量值(決定于長度)。在同步模式中,更新頻率取決于控制器。如果控制器詢問磁致伸縮位移傳感器的頻率快于傳感器可能提供數(shù)據(jù)的速度,則傳感器將自動轉換到異步模式,向主控制器提供最及時的位置信息。
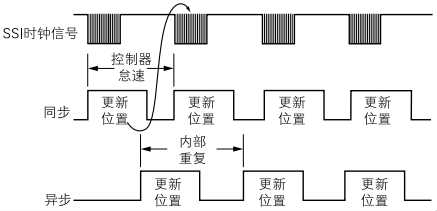
同步更新模式
來自主控制器的時鐘脈沖系列被用來選通傳感器數(shù)據(jù),傳感器收到一個時鐘脈沖就將1位的位置信息發(fā)送到控制器。來自主控制器的時鐘脈沖向傳感器發(fā)出信號進行測量。這次測量的位置數(shù)據(jù)將用于下一個時鐘脈沖周期中。
注: 這種模式的數(shù)據(jù)總是更新周期中的舊的數(shù)據(jù)。
異步更新模式
當主控制器發(fā)出請求時,磁致伸縮位移傳感器以其最快的內部詢問速率(取決長度)取得測量值并提供信息。
注:如果控制器或接口模塊不是專門指定同步模式,推薦采用異步模式的傳感器。
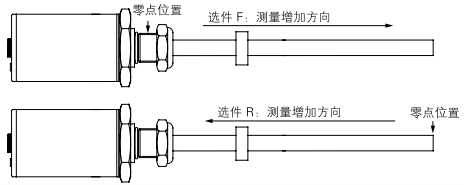
方向
位移傳感器可以組態(tài)位移或速度的增加、減少。選項F(測量向前的方向)在磁環(huán)從傳感器的桿頭移動到桿稍端時,將會增加計數(shù)。選項R將完全相反。零位將位于安裝螺紋上。在這個范圍,實際上不可能探測到磁信號。如果磁致伸縮位移傳感器是選擇反向測量,零點將在傳感器遠處的桿稍端處,在這位置也不能探測到磁信號。如果選擇速度時,這時傳感器輸出的將是速度,而不是位移。
分辨率
在選型配置中可選擇位置信號輸出的分辨率,并可按英制或公制單位訂購。
Copyright ? 2018 深圳市易測電氣有限公司 地址:深圳市寶安區(qū)松崗街道紅星社區(qū)宏海大廈5樓 備案號:粵ICP備19052563號 網(wǎng)站地圖(百度 / 谷歌)