在高速鐵路的建設(shè)中,需要使用運(yùn)梁車將箱梁從梁場運(yùn)送到架設(shè)現(xiàn)場,而在運(yùn)送的過程中,往往要通過許多隧道,一般的運(yùn)梁車由于高度限制,使箱梁無法通過隧道。因此,設(shè)計出適合通過隧道的運(yùn)梁車,在高鐵工程中很有必要。現(xiàn)在一種解決箱梁過隧的方法是采用液壓頂升系統(tǒng),在未放箱梁前,先通過比例控制閥來將頂升油缸調(diào)至較低位置,再把箱梁放于頂升油缸上運(yùn)送,當(dāng)箱梁運(yùn)至工地,實(shí)現(xiàn)運(yùn)梁車與架橋機(jī)對接后,上升頂升油缸至一定高度,將移梁小車放于箱梁下適當(dāng)位置,再下降頂升油缸,將箱梁放于移梁小車上,此后,便可進(jìn)行移梁和架梁操作。但是運(yùn)梁車馱運(yùn)的箱梁在升降過程中,各個油缸很難保證不發(fā)生傾斜扭曲傾斜的現(xiàn)象,因此,在控制過程中,需要對升降進(jìn)行合理的控制。
發(fā)明內(nèi)容
針對上述現(xiàn)有技術(shù)存在的問題,本實(shí)用新型提供一種過隧運(yùn)梁車的頂升同步控制系統(tǒng),滿足油缸控制的穩(wěn)定、準(zhǔn)確和高效,克服了液壓系統(tǒng)的滯后性,從而保證箱梁在運(yùn)送及升降過程中不發(fā)生扭曲傾斜的現(xiàn)象。
附圖說明
圖1為本實(shí)用新型原理框圖。
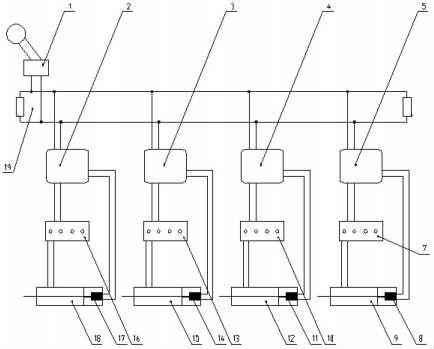
圖中:1、控制手柄,2、控制器,3、控制器,4、控制器,5、控制器,7、多路閥,8、磁致伸縮位移傳感器,9、頂升油缸,10、多路閥,11、磁致伸縮位移傳感器,12、頂升油缸,13、多路閥,14、磁致伸縮位移傳感器,15、頂升油缸,16、多路閥,17、磁致伸縮位移傳感器,18、頂升油缸,19、CAN總線。
具體實(shí)施方式
如圖1所示,本實(shí)用新型過隧運(yùn)梁車的頂升同步控制系統(tǒng),包括控制手柄1、控制器2、3、4、5、多路閥16、13、10、7和液壓頂升油缸18、15、12、9,還包括磁致伸縮位移傳感器17、14、11、8,控制手柄1將給定信息傳輸給四個控制器2、3、4、5,信息經(jīng)四個控制器2、3、4、5處理之后,分別經(jīng)四個多路閥16、13、10、7來控制四個液壓頂升油缸18、15、12、9,液壓頂升油缸18、15、12、9中分別安裝有磁致伸縮位移傳感器17、14、11、8,磁致伸縮位移傳感器17、14、11、8將液壓頂升油缸18、15、12、9的位置信息分別傳給各自的控制器2、3、4、5。
作為優(yōu)選,控制手柄I通過CAN總線19與控制器2、3、4、5連接。采用CAN總線通訊結(jié)構(gòu)與軟件設(shè)計,減少了電氣元器件的實(shí)用,簡化了電路,節(jié)約了成本。
工作原理:磁致伸縮位移傳感器17、14、11、8,實(shí)時監(jiān)控每個油缸的升降高度,并作為閉環(huán)負(fù)反饋信號輸入到控制器2、3、4、5,經(jīng)過A/D轉(zhuǎn)換后與給定值進(jìn)行比較,采用PID算法得出控制信號,自動調(diào)整液壓頂升油缸18、15、12、9,升降速度,保證箱梁在升降過程中不發(fā)生傾斜。從接收反饋信號到輸出控制信號的整個閉環(huán)控制過程,均通過控制器2、3、4、5來實(shí)現(xiàn)。整個控制過程滿足其同步性、快速性、準(zhǔn)確性和穩(wěn)定性。
在工程領(lǐng)域,常常利用閉環(huán)控制來控制連續(xù)變化的模擬量,而無論是使用模擬控制器的模擬控制系統(tǒng),還是使用計算機(jī)的數(shù)字控制系統(tǒng),PID控制都得到了廣泛的應(yīng)用。利用積分控制可以消除系統(tǒng)的靜差,微分控制可以改善系統(tǒng)的動態(tài)響應(yīng)速度,比例、積分、微分控制三者有效地結(jié)合就可以滿足不同的控制要求。依據(jù)被控對象的具體情況,還可以靈活合理的采用各種PID的改進(jìn)型控制。
Copyright ? 2018 深圳市易測電氣有限公司 地址:深圳市寶安區(qū)松崗街道紅星社區(qū)宏海大廈5樓 備案號:粵ICP備19052563號 網(wǎng)站地圖(百度 / 谷歌)