
隧道襯砌臺(tái)車作為一種先進(jìn)的大型機(jī)械設(shè)備,已經(jīng)在礦山、地鐵、水利工程、巖土工程等大型建設(shè)的混泥土澆灌施工中得到廣泛的應(yīng)用。作為隧道澆灌的主要模板設(shè)備,當(dāng)一段隧道混凝土澆灌完成后,臺(tái)車?yán)^續(xù)往里走行,進(jìn)行下一段隧道混凝土澆灌的施工。常用的隧道襯砌臺(tái)車走行控制采用兩臺(tái)交流電機(jī)經(jīng)減速箱變速后直接驅(qū)動(dòng)臺(tái)車走行,在控制箱面板上設(shè)置“前行”、“后退”、“停車”三個(gè)按鈕,按下臺(tái)車“前行”按鈕,正轉(zhuǎn)接觸器吸合,電機(jī)正轉(zhuǎn),臺(tái)車往前走;按下臺(tái)車“后退”按鈕,反轉(zhuǎn)接觸器吸合,電機(jī)反轉(zhuǎn),臺(tái)車后退;臺(tái)車在前行或后退過程中,按下臺(tái)車“停車”按鈕,臺(tái)車走行馬上停止。在具有一定坡度的隧道,外加制動(dòng)器,制動(dòng)器與走行電機(jī)同時(shí)得電同時(shí)斷電,并聯(lián)控制。采用電機(jī)直接驅(qū)動(dòng)臺(tái)車走行,臺(tái)車停車時(shí)間短,機(jī)械沖擊比較的大;在坡度比較大的隧道,臺(tái)車爬坡能力不行,具有很大的施工局限性;兩臺(tái)驅(qū)動(dòng)電機(jī)直接工頻啟動(dòng),很難做到電機(jī)啟動(dòng)同步,走行的控制精度不高; 由于臺(tái)車運(yùn)行工況特殊,點(diǎn)動(dòng)頻繁,接觸器的頻繁吸合很容易引起觸點(diǎn)打火及電弧現(xiàn)象,頻繁打火觸點(diǎn)容易粘在一起帶來運(yùn)行故障;沒有實(shí)時(shí)監(jiān)控系統(tǒng)不方便對(duì)臺(tái)車的直觀操作。
實(shí)用新型內(nèi)容
本實(shí)用新型提供一種爬坡能力強(qiáng)、控制精度高,行走平穩(wěn),調(diào)試與監(jiān)控方便的隧道襯砌臺(tái)車走行裝置控制系統(tǒng)。
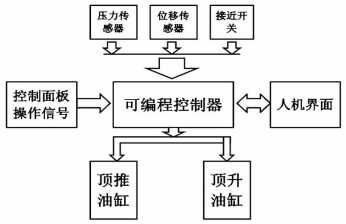
本實(shí)用新型提供的這種包括用于驅(qū)動(dòng)臺(tái)車走行的動(dòng)力機(jī),還包括PLC及與該P(yáng)LC 連接的壓力傳感器、磁致伸縮位移傳感器、接近開關(guān)、控制面板,所述動(dòng)力機(jī)均采用油缸,控制面板給 PLC操作信號(hào),由PLC控制所述油缸的動(dòng)作,在檢測(cè)到傳感器工作都正常的前提下,驅(qū)動(dòng)所述油缸走行動(dòng)作。
所述油缸采用八個(gè),四個(gè)頂升油缸和四個(gè)頂推油缸,其中四個(gè)頂升油缸用于在臺(tái)車爬坡時(shí)調(diào)整臺(tái)車的高度和維持整個(gè)臺(tái)車的平衡;四個(gè)頂推油缸用于驅(qū)動(dòng)臺(tái)車行走。
本實(shí)用新型用于驅(qū)動(dòng)臺(tái)車走行的動(dòng)力機(jī)由于都采用油缸,并通過PLC來控制整個(gè)油缸系統(tǒng),使臺(tái)車具有很好的爬坡能力,并且在斜坡隧道施工時(shí),能自動(dòng)調(diào)整臺(tái)車的高度和維持臺(tái)車的平衡狀態(tài);采用PLC控制,臺(tái)車走行控制精度大大的提高,而且通過人機(jī)界面能很好的了解到臺(tái)車的運(yùn)行狀況;采用油缸驅(qū)動(dòng),大大降低了臺(tái)車在停車時(shí)的機(jī)械沖擊,保證施工的安全。
附圖說明
圖1本實(shí)用新型的系統(tǒng)控制框圖。
具體實(shí)施方式
下面結(jié)合附圖對(duì)本實(shí)用新型作詳細(xì)介紹:
如圖1所示,PLC為整個(gè)控制系統(tǒng)的核心部分,壓力傳感器用于檢測(cè)每個(gè)油缸的運(yùn)行油壓;磁致伸縮位移傳感器用于檢測(cè)油缸位移運(yùn)行量程;接近開關(guān)為油缸位移的限位開關(guān)。當(dāng)由人機(jī)界面或操作面板給PLC走行指令后,PLC在檢測(cè)到各傳感器工作都正常的前提下,驅(qū)動(dòng)油缸走行動(dòng)作。PLC通過R232控制網(wǎng)絡(luò),把油缸的運(yùn)行狀態(tài)信息返回到人機(jī)界面,操作員通過人機(jī)界面實(shí)時(shí)了解臺(tái)車走行的工況。
本實(shí)用新型有四個(gè)頂升油缸和四個(gè)頂推油缸,四個(gè)頂升油缸,前面兩個(gè)后面兩個(gè), 在頂升過程中,前后兩組油缸都保持完全同步運(yùn)行,同步運(yùn)行采用磁致伸縮位移傳感器實(shí)現(xiàn)。通過安裝在每個(gè)頂升油缸上的磁致伸縮位移傳感器把每個(gè)油缸的位移行程轉(zhuǎn)換成模擬信號(hào),PLC采集到磁致伸縮位移傳感器的模擬信號(hào)后,通過程序轉(zhuǎn)換成工程值,對(duì)前兩個(gè)油缸的工程值進(jìn)行比較,當(dāng)偏差值大于10mm時(shí)候,位移大的油缸停止運(yùn)行,位移小的繼續(xù)運(yùn)行,當(dāng)偏差值小于等于2mm時(shí), 兩油缸同步運(yùn)行。后兩個(gè)頂升油缸比較方法與前兩個(gè)比較方法完全相同。四個(gè)頂推油缸分前后兩組,每組油缸在走行過程中保持完全同步運(yùn)行,油缸的同步采用磁致伸縮位移傳感器實(shí)現(xiàn)。 安裝在每一個(gè)油缸上的位移傳感器把每個(gè)油缸的位移值轉(zhuǎn)換成模擬量信號(hào),PLC采集到磁致伸縮位移傳感器的模擬量信號(hào)后,通過程序轉(zhuǎn)換成工程值,比較前兩個(gè)油缸的工程值,當(dāng)偏差大于10mm時(shí)候,位移大的油缸停止運(yùn)行,位移小的油缸繼續(xù)運(yùn)行,當(dāng)位移偏差小于2mm時(shí),兩油缸同步運(yùn)行。后兩油缸同步控制與前兩油缸完全一樣。臺(tái)車自動(dòng)行走之前先在PLC程序中強(qiáng)制給一個(gè)預(yù)頂壓力,防止油缸壓力不足造成行走機(jī)構(gòu)脫勾事故,保證行走機(jī)構(gòu)與軌道穩(wěn)定接觸,當(dāng)壓力大于或等于預(yù)定壓力后才能進(jìn)行自動(dòng)行走動(dòng)作。預(yù)頂通過壓力傳感器來實(shí)現(xiàn),每一個(gè)頂推缸所帶的壓力傳感器對(duì)其運(yùn)行的壓力進(jìn)行檢測(cè),PLC采集到壓力傳感器的反饋信號(hào)通過程序轉(zhuǎn)換成工程值,程序內(nèi)部把工程值與設(shè)定預(yù)頂值比較,大于預(yù)頂值才能進(jìn)行自動(dòng)走行動(dòng)作。頂推油缸推出“大于最大值”至收縮“小于最小值”為一個(gè)行程步,一個(gè)行程步完成后臺(tái)車走行自動(dòng)停止,再次按“行走啟動(dòng)”臺(tái)車走行重新開始,在臺(tái)車走行過程中任意位置按“走行停止”,臺(tái)車走行馬上停止。
Copyright ? 2018 深圳市易測(cè)電氣有限公司 地址:深圳市寶安區(qū)松崗街道紅星社區(qū)宏海大廈5樓 備案號(hào):粵ICP備19052563號(hào) 網(wǎng)站地圖(百度 / 谷歌)
技術(shù)支持:易測(cè)電氣 [易測(cè)電氣]


咨詢熱線")
